АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Министерство образования и науки Российской Федерации 6 страница
 А35 – двоканальний алгебраїчний блок для виконання операцій: множення, ділення, витягання квадратного кореня, зведення в квадрат, підсумовування вхідних струмових сигналів.
А35 – двоканальний алгебраїчний блок для виконання операцій: множення, ділення, витягання квадратного кореня, зведення в квадрат, підсумовування вхідних струмових сигналів.
 Н05 – нелінійний блок для формування функції методом кускової апроксимації з гальванічним розділенням і підсумовуванням вхідних сигналів.
Н05 – нелінійний блок для формування функції методом кускової апроксимації з гальванічним розділенням і підсумовуванням вхідних сигналів.
 Л05 – двоканальний логічний блок для аналого-релейного перетворення шляхом порівняння сигналів, позиційного регулювання, гальванічного розділення і підсумовування вхідних сигналів.
Л05 – двоканальний логічний блок для аналого-релейного перетворення шляхом порівняння сигналів, позиційного регулювання, гальванічного розділення і підсумовування вхідних сигналів.
2) Блоки динамічного перетворення сигналів
 Д05 – двоканальний блок для аперіодичного, інтегрального, диференційного і пропорційний перетворення сигналів з гальванічним розділенням і підсумовуванням вхідних сигналів.
Д05 – двоканальний блок для аперіодичного, інтегрального, диференційного і пропорційний перетворення сигналів з гальванічним розділенням і підсумовуванням вхідних сигналів.
 Д06 – одноканальний блок з функціями блоку Д05 та дистанційним авто-налаштуванням параметрів.
Д06 – одноканальний блок з функціями блоку Д05 та дистанційним авто-налаштуванням параметрів.
 Д07 – інтегратор з енергонезалежною пам’яттю, двобічним обмеженням вихідного сигналу, гальванічним розділенням і підсумовуванням вхідних сигналів
Д07 – інтегратор з енергонезалежною пам’яттю, двобічним обмеженням вихідного сигналу, гальванічним розділенням і підсумовуванням вхідних сигналів
Всі основні блоки системи «Каскад-2» містяться в уніфікованих корпусах розміру 60×160×500 мм. Елементна база системи – аналогові інтегральні мікросхеми.
11.2 Регулюючий блок Р27
Блок Р27 призначений для формування ПІД-закону регулювання разом із ВМ постійної швидкості. Замінює одночасно вимірюючий И04 і регулюючий Р21 блоки системи «Каскад», містить в одному корпусі вимірюючий (його тип залежить від модіфікації блоку Р27) і регулюючий Р027 модулі.
Виготовляються чотири модифікації блоку Р27, що відрізняються типами вимірюючих модулів:
Р27 – вхідні сигнали уніфіковані струмові 0-5, 0-20, 4-20 мА та за напругою 0-10 В;
Р27.1 – як у блоці Р27 і один додатковий сигнал взаємної індуктивності диференційно-трансформаторного перетворювача на 10 мГн у межах від -10 до +10 мГн;
Р27.2 – як у блоці Р27 і один додатковий сигнал зміни активного опору термоперетворювача опору на 20 Ом у межах 0-100 Ом;
Р27.3 – як у блоці Р27 і один додатковий сигнал зміни термо-ЕРС перетворювача термоелектричного (градуювань ХК, ХА, ПП, ПР-30/6 або ВР-5/20-1) на 10 мВ у межах 0-50 мВ.
11.2.1 Вимірюючий модуль И001
Cтруктурна схема вимірюючого модуля И001 наведена в верхній частині рисунку 11.1. модуль містить модулятори 1, 2, 3, підсилювач-модулятор 4, суматор 5, демодулятор-підсилювач 6, генератор 7, джерело опорної напруги 8, вузол коректора 9.
Функції вимірюючого модуля:
– підсумовування до чотирьох уніфікованих вхідних сигналів постійного струму, а також вхідних сигналів, що надходять від вимірюючих перетворювачів з електричними сигналами;
– введення інформації про задане значення регульованої величини. Формування та підсилення сигналу неузгодження;
– незалежне масштабування вхідних сигналів;
– гальванічне розділення вхідних та вихідних ланок, а також вхідних ланцюгів одне від одного;
Модуль виконує вказані функції у відповідності з рівнянням статичної характеристики
 (11.1)
(11.1)
в якому всі сигнали виражені у відносних величинах від їх номінального діапазону зміни. Вихідний сигнал модуля змінюється від -10 до +10В.
Принципова електрична схема вимірюючого модуля И001 наведена на рисунку 11.3.
Сигнал Х 1 не масштабується і обмежується за амплітудою на діодах V 1, V 2. Діоди призначені для обмеження амплітуди вхідних сигналів, тому при номінальних значеннях вхідного сигналу обидва діоди закриті, а при перенапруженні – відкриваються і обмежують амплітуду вхідного сигналу в залежності від їх знаку.
конденсатори С 1- С 3, С 6 використовуються для фільтрації високочастотних шумів у вхідних сигналах. Трансформатор Т 1 використовується одночасно і для гальванічного розділення вхідних сигналів, і для їх підсумовування.
Модуляція вхідних сигналів Х 1- Х 4 виконується транзисторними парами V 9- V 12. На транзисторних парах виконані електричні ключі, що перетворюють вхідні сигнали постійної напруги у сигнали змінної напруги типу «пряма хвиля». Керування цими транзисторними парами виконується сигналами а-д від генератора з частотою 20 кГц.

рисунок 11.1 – Структурна схема блоку Р27
На резисторах R 12, R13, R14, R16 виділяються сигнали змінної напруги після транзисторних пар, що далі надходять на вхідні обмотки ІІ-V трансформатора Т 1. При протіканні струмів у вхідних обмотках виникає магнітне поле, що через сердечник трансформатора Т 1 передаються в обмотку І, і т.ч. одночасно виконується гальванічне розділення вхідних і вихідних сигналів, а також їх підсумовування.
Транзисторна пара V 13 включається синхронно з іншими транзисторними парами і заряджає конденсатор С 7, який потім віддає накопичену енергію ОП А 2 в моменти відключення транзисторної пари. Таким чином, на конденсаторі С 7 виконується демодуляція вихідного сигналу. Операційний підсилювач А 2 підсумовує сигнали з обмотки І, коректора, задатчика, «установка 0».
Сигнали з входів Х 2, Х 3 і Х 4 масштабуються за допомогою потенціометрів, відповідно, R 13 («α 2»), R 14 («α 3») і R 16 («α 4»).

Рисунок 11.3 – Принципова електрична схема модуля И001
На вхід Х 4 можуть бути подані або уніфікований сигнал за напругою Х 4.1 (0-10 В), або один з струмових сигналів Х 4.2 (0-5 мА), Х 4.3 (0-20 мА), Х 4.4 (4-20 мА). Операційний підсилювач А 1 перетворює один із вказаних вище вхідних сигналів в вихідний сигнал за напругою, який далі надходить на вхід транзисторної пари V 12 і на обмотку ІІ трансформатора Т 1.
Випрямлена діодами V 15, V 16 та згладжена конденсаторами С 8, С 9 напруга з обмотки II Т 2 використовується для формування гальванічно ізольованого живлення ОП А 1.
Генератор 7 містить автогенератор прямокутної напруги з частотою 20 кГц, виконаний на ОП А 4 та тригер, виконаний на транзистоpax V 19, V 20. Частота напруги, що генерується, визначається постійною часу ланки R 39- C 18 та величиною позитивного зворотного зв’язку (ПЗЗ), що створюється ланкою R 40- R 42. Підсилювачем потужності є тригер, керований вихідною напругою автогенератора. Навантаженням тригеру є обмотка I трансформатора Т 2. З вихідних обмоток ІІІ-VІІ трансформатора Т 2 знімаються напруги прямокутної форми а-д, що керують ключами модуляторів та демодулятора.
Джерело опорної напруги 8 виконане на ОП A 3 і транзисторі V 23. Величина стабілізованої напруги на вході ОП задається параметричним стабілізатором на стабілітроні V 24, потім підсилюється за потужністю транзистором V 23. Амплітуда вихідної напруги підстроюється змінним резистором R 35.
11.2.2 Регулюючий модуль Р027
Структурна схема регулюючого модуля Р027 наведена в нижній частині рисунку 11.1. модуль містить функціональні вузли: демпфер 10, диференціатор 11, суматор каналу зворотного зв’язку 12, інтегратор 13, суматор прямого каналу 14, трипозиційне реле 15 та підсилювач потужності 16.
Передавальні функції модуля разом з інтегруючим виконавчим механізмом описуються рівняннями:
– при ПІ-законі регулювання
 (11.2)
(11.2)
– при ПІД-законі регулюванні
 (11.3)
(11.3)
де TS – час повного ходу ВМ (час сервомотору), с,
Модуль виконує наступні функції:
– демпфування (згладжування) сигналу неузгодження;
– введення заборони на керування навантаженням.
– формування вихідного імпульсного сигналу у відповідності з одним із законів регулювання: П-закону при охопленні блоку негативним зворотним зв’язком за положеннямВМ, ПІ- та ПІД-закони разом з ВМ постійної швидкості, дво- та трипозиційні;
– індикацію вихідного сигналу.
Вхідний сигнал неузгодження ε надходить від вимірюючого модуля до демпфера 10 (фільтра високих частот), в якому виділяється його математичне очікування (середнє поточне). З виходу демпфера сигнал надходить до диференціатора 11 і підсилювача прямого каналу 14. У вузлах 14, 15 і 12, 13 формується ПІ-закон регулювання за методом граничної системи.
ПІД-закон формується за структурною схемою автоматичного регулятора з неколивальною баластною ланкою (див. розділ 6.6), згідно з якою сигнал неузгодження e та його похідна e’, що формується в диференціаторі 11, надходять до ПІ-регулятора, виконаного за принципом граничної системи (рисунок 11.2), властивості якого були вивчені в розділі 6.
вузли 12, 13 (рисунок 11.1) реалізують інерційну ланку першого порядку ЗЗ для формування ПІ-закону регулювання. Інерційна ланка виконана як активний чотириполюсник з ОП в прямому ланцюгу і з інтегруючою RC -ланкою в ЗЗ (на відміну від пасивною RC- ланки ЗЗ в блоці Р21).

Рисунок 11.2 – Структурна схема ПІД-регулятора з неколивальною баластною ланкою
Як відомо, активними називаються пристрої з ОП, охопленими негативними ЗЗ. Їх перевага перед пасивними ланками полягає в тому, що їх вихідний сигнал є потужним і не залежить від величини опору навантаження.
ОП в системі приладів «каскад-2» виконані як інтегральні мікросхеми. Такі інтегральні ОП мають такі ж або навіть кращі технічні характеристики, ніж у модулів ОП системи «Каскад».
У вузлі 13 розташовані RС -елементи ЗЗ, що визначають властивості інерційної ланки. трипозиційне реле із зоною нечутливості і зоною повернення реалізоване у вузлі 15. У вузлі 16 міститься потужний вихідний каскад для управління пусковим пристроєм ВМ постійної швидкості, який має вихідні лінії Z 1 з дискретними сигналами «Більше», «Менше».
В блоці є можливість підключення сигналу Х 03, що разом з сигналом неузгодження ε буде перетворюватись за ПІД-законом, а також можливість подавати сигнал Х 02, що буде перетворюватися за ПІ-законом.
Крім вихідного потужного дискретного сигналу, можна використовувати сигнал Z 2 з виходу блока 15. ці сигнали відрізняються амплітудами: сигнал Z 1 має амплітуду логічної одиниці =24 В, а сигнал Z 2 змінюється синхронно з Z 1 і має амплітуду =10 в.
Сигналом «зовнішнє керування» можливо вимикати вихідний каскад, тобто вимикати регулюючий прилад в цілому.
Принципова схема регулюючого модуля Р027 наведена на рисунку 11.4.
Суматор прямого каналу 14 побудований на ОП А 2 з високоомними входами, охопленому НЗЗ через резистор R 6 та конденсатор С 3 (рисунок 11.4). До неінвертуючого входу ОП підключений демпфер 10 у вигляді аперіодичної ланки R 2- C 2, що фільтрує завади в сумі вхідних сигналів X 01 та Х 03. Постійна часу демпфера «τДФ» регулюється потенціометром R 2. На інвертуючому вході ОП А 2 суматора підсумовуються вхідний сигнал Х 2 та сигнал з виходу суматора каналу НЗЗ.
Диференціатор 11 побудовано на ОП А 1 з високоомними входами. Сигнал до його входу надходить через диференціюючий конденсатор С 2.
Постійна часу диференціювання τД регулюється плавно потенціометром R10 («τД») та дискретно замикачем S l («×1», «×10», «Выкл»).
Трипозиційне реле 16 (трипозиційний тригер) виконаний на ОП А 4, охопленому НЗЗ через нелінійний елемент на діодному мості V 2, що формує зону нечутливості Δ блока. Величина Δ плавно регулюється потенціометром R 15 («Δ»).

рисунок 11.4 – принципова схема регулюючого модуля Р027
Формування ПІД-закону регулювання виконується за допомогою функціонального НЗЗ модуля, що містить інтегратор, побудований на ОП А 5, суматор каналу зворотного зв’язку, побудований на ОП A 3 та ланцюг жорсткого НЗЗ інтегратора, що має паралельно з’єднані резистори R 32 та R 33 в положенні замикача S 2 «×1» або резистор R 32 в положенні «×10».
Постійна часу інтегрування τи регулюється плавно потенціометром R 20 («τи») та дискретно за допомогою замикача S 2 («×1», «×10», «Выкл»).
Коефіцієнт передачі модуля αП плавно регулюється потенціометром R 37 («αП»).
Тривалість інтегральних імпульсів tИ модуля регулюється плавно потенціометром R 43 («tИ»).
Підсилювач потужності містить два канали, що спрацьовують при протилежних полярностях вхідного сигналу. Кожний канал складається з блокінг-генератора, виконаного на транзисторах V 6, V 7 та транзисторів V 10, V 11, що працюють у ключовому режимі. Елементи R 61, R 62, V 19, V 20 призначені для захисту та обмеження струму в світлодіодах, розташованих на передній панелі блока, а елементи V 12- V 14 – для захисту транзисторів V 10, V 11 при індуктивному навантаженні.
При подачі сигналу заборони на керування навантаженням блока бази транзисторів V 6 та V 7 блокінг-генераторів закорочуються з ОТ модуля, імпульси в колекторному ланцюгу блокінг-генераторів будуть відсутні і вихідний сигнал Z 1 буде дорівнювати нулю незалежно від значення вхідного сигналу модуля.
11.3 Регулюючий блок Р17 з аналоговим вихідним сигналом
Регулюючий блок Р17 з аналоговим вихідним сигналом в автоматичному режимі роботи формує ПІД-закон регулювання разом з виконавчим механізмом пропорційного переміщення або пропорційної дії і замінює два блоки И04 і Р12. Блок виготовляється в тих же модифікаціях, що і блок Р27, тобто в них використовується чотири різних типів вимірюючих модулів та один і той же тип регулюючого модуля.
11.3.1 Вимірюючий модуль ИТ002
у верхній частині рисунку 11.5 наведена структурна схема вимірюючого модуля ИТ002, що має входи для уніфікованих сигналів Х 2, Х 3 і додатковий вхід Х 1 для підключення термопари. Модуль містить вузли: суматор 1, демодулятор 2, коректор 3, компенсатор температури навколишнього середовища 4, джерело опорної напруги 5 і вузол масштабування 6.

рисунок 11.5 – Структурна схема блоку Р17
Термопара (сигнал Х 1) підключається до коробки холодних спаїв типу КХС-МК, призначеної для компенсації температури навколишнього середовища, в якій до ЕРС термопари додається потенціал, що компенсує відміну температури навколишнього середовища від 0 ºC. Тип підключеної термопари вибирається за допомогою зовнішніх перемичок. Вхідні сигнали Х 2 і Х 3 – уніфіковані електричні сигнали.
Сигнал неузгодження ε на виході модуля дорівнює сумі сигналів:
 (11.4)
(11.4)
де всі сигнали виражені у відносних величинах від їх номінального діапазону зміни. Вихідний сигнал модуля змінюється від -10 до +10В.
Принципова схема вимірюючого модуля ИТ002 наведена на рисунку 11.6.
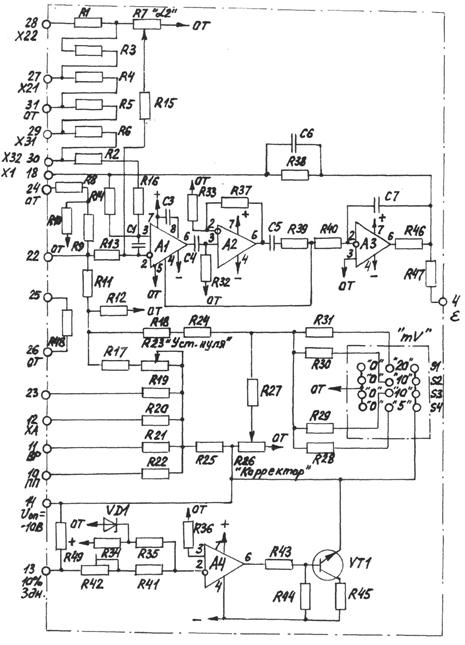
Рисунок 11.6 – принципова схема вимірювального модуля ИТ002
Вузол підсумовування та масштабування містить резистори R 1- R 4, R 11, R 13- R 16 та потенціометр R 7, за допомогою якого встановлюється коефіцієнт масштабування α 2.
Прецизійний (точний) підсилювач сигналу низького рівня від термопари містить три ОП А 1- А З. Мікросхема А 1 працює за принципом модуляції-демодуляції сигналу постійного струму (MДМ) і містить внутрішній модулятор на польових транзисторах, підсилювач змінного струму, демодулятор та генератор. Завдяки МДМ-перетворенню сигналу усувається «дрейф 0» в ОП, що характерний для підсилювачів постійної напруги і викликаний зміною температури, напруги живлення, старінням елементів тощо.
Частота генерації внутрішнього генератора ОП А 1 задається конденсатором С 3 та становить 20 кГц. Сигнал змінного струму з вихіду ОП А 1 підсилюється ОП А 2 та демодулюється внутрішнім демодулятором ОП А 1.
ОП A 3 працює як кінцевий підсилювач постійного струму та одночасно виконує фільтрацію демодульованого сигналу з постійною часу TИ = R 40· C 7. Коефіцієнт передачі підсилювача в цілому (1000) визначається величиною резистора R 38, встановленого в жорсткому НЗЗ.
На виході підсилювача сигналу термопари підключений пристрій захисту, що містить резистори R 8- R 10 і забезпечує максимальний негативний сигнал на виході вимірювального модуля при обриві лінії термопари. Цей сигнал забезпечує закриття регулюючого органу або зниження потужності регульованого апарата при обриві лінії.
Вузол коректора містить резистивну матрицю R 27- R 31, що перемикається замикачами S 1- S 4 та виконує дискретне встановлення сигналу коректора, та потенціометр R 26, за допомогою якого виконується плавна зміна цього сигналу. Сумарна напруга сигналу коректора виділяється на резисторі R 12.
Вузол компенсації містить резистори R 12, R 17 та R 19, що разом із мідним резистором Rm, встановленим у коробці холодних спаїв КХС-МК, складають компенсаційний міст.
11.3.2 Регулюючий модуль Р017
Регулюючий модуль Р017 формує ПІД-закон регулювання при всіх включених складових закону регулювання
 (11.5)
(11.5)
де Yi(s), ε(s) – зображення за Лапласом, відповідно, вихідного сигналу модуля та сигналу неузгодження, виражених у відносних одиницях від номінального діапазону їх зміни.
ПІ-, ПД-, П-закони регулювання реалізовані при вимкнутих, відповідно, Д-, І- та ІД-складових.
структурна схема модуля Р017 наведена в нижній частині рисунку 11.5.
На вхід Х 0 модуля надходить сигнал неузгодження ε з виходу вимірюючого модуля, який згладжується демпфером з постійною часу ТДФ і підсилюється у КП раз. У вузлі 8 цей сигнал інтегрується з постійною часу ТИ, а у вузлі 9 він диференціюється з постійною часу ТД. Далі П, І та Д-складові закону підсумовуються у вузлі 10.
Вузол 14 призначений для безпоштовхового переключення з ручного в автоматичний режим та навпаки. вузол 11 дозволяє виконувати ручне управління навантаженням (виконавчим механізмом).
У вузлі 13 формуються обмеження вихідного сигналу за мінімумом і максимумом, оскільки ВМ пропорційної дії не мають обмежувачів переміщення.
вузол 12 – перетворювач вихідного сигналу модуля за напругою в уніфікований струмовий сигнал. На виході модуля є два вихідних сигнали однієї і тієї ж форми: Y 1 – за напругою у межах 0-10 В, Y 2 – струмовий сигнал в одному з вибраних за допомогою перемичок діапазонів 0-5, 0-20 або 4-20 мА.
Робота модуля за принциповою схемою (рисунок 11.7):

Рисунок 11.7 – Принципова схема регулюючого модуля Р017
Вхідний сигнал Х 0 (сигнал неузгодження ε) надходить на дільник вхідної напруги і далі на демпфер, виконаний у вигляді RC -ланки на резисторі R 11 і конденсаторі С 2.
На операційному підсилювачі А 1 виконаний масштабуючий підсилювач, коефіцієнт передачі якого встановлюється потенціометром R 20 «КП». Вид ЗЗ в ОП А 1 – послідовний, тобто вхідний сигнал надходить на його прямий вхід, а сигнал ЗЗ – на інверсний.
Вихідний сигнал від ОП А 1надходить на блок інтегрування на ОП А 2, в якому на вході міститься резистор, а інтегруючий конденсатор С 4 знаходиться в ланці ЗЗ. Вхідний резистор складений і містить потенціометр R 1 для плавного встановлення постійної часу інтегрування ТИ, і перемикач S 1, що має три положення: «Выкл», «×1», «×10».
Вихідний сигнал від ОП А 1також надходить на вхід диференціатора на ОП А 3, в якому у вхідному колі міститься диференціюючий конденсатор С 1, а у ЗЗ – складений резистор. З метою попередження входження диференціатора у стан насичення при швидких змінах вхідного сигналу діоди V 2 і V 3 обмежують амплітуду вхідного сигналу підсилювача А 3.
Т.ч. в ОП А 2 і А 3 використані паралельні ЗЗ, а в ОП А 1 – послідовний, то на суматорі А 4 ці складові надходять на різні входи: П-складова на інверсний вхід, а І і Д-складові – на прямий вхід. Тому всі складові закону регулювання додаються з однаковими знаками.
Реле K 1призначене для безпоштовхового переключення режимів роботи автоматичного регулятора. Для цього в автоматичному режимі, як показано на рисунку 11.7, сигнал надходить на підсилювач А 7, з’єднаний з модулем обмеження вихідного сигналу на А 5, А 8.
Вихідний сигнал Y 1 може додатково підсилюватися в 10 разів при перемиканні перемикача S 3під назвою «КП» в положення «×10».
Якщо вихідний сигнал Y 1 стає більшим за напругу обмеження по максимуму Umax, то відкривається А 8, від вихідного сигналу віднімається його сигнал і далі сигнал Y 1 залишається постійним на рівні обмеження (рисунок 11.8). Якщо вихідний сигнал Y 1 стає меншим за напругу обмеження по мінімуму Umin, то відкривається А 7, до вихідного сигналу додається сигнал А 7 і далі вихідний сигнал Y залишається постійним на рівні обмеження. Статична характеристика між рівнями обмеження вихідного сигналу є незмінною.

рисунок 11.8 – Статична характеристика вузла обмеження сигналу
У режимі роботи модуля «ручний» на обмотку реле K 1 подається напруга від зовнішнього перемикача на блоці управління. Контакти реле K 1.1 перемикаються в нижнє положення і інтегратор А 2 та суматор А 4охоплюються жорстким негативним ЗЗ, тобто замість ПІД-закону модуль формує П-закон з коефіцієнтом передачі 1. Т.ч. регулюючий каскад переходить в режим слідкування (повторення) вхідного сигналу.
Навантаженням в цей час оператор керує вручну за допомогою зовнішнього потенціометричного задатчика. Для переключення з ручного в автоматичний режим роботи необхідно спочатку вручну зменшити сигнал неузгодження ε до нуля і потім переключити регулюючий модуль в режим роботи «автоматичний».
Одночасне ручне зведення до нуля сигналів ε для значної кількості контурів автоматичного регулювання складного ТОУ досить трудомістка, тому її звичайно виконують за допомогою блоків автоматичних технологічних захистів УКТС. Блоки УКТС дозволяють запам’ятувати початкове значення неузгодження ε (0), відняти його від поточного значення для штучного створення нульового значення сигналу неузгодження ε (0) = 0 для безповштовхового перемикання в автоматичний режим і потім плавно відновити сигнал неузгодження до його поточного значення.
Вихідний струмовий сигнал модуля Y 2 за напругою перетворюється в струмовий Y 1 за допомогою перетворювача напруги в струм, що виконаний на ОП А 6. За допомогою перемичок між клемами 7, 9, 5, 13, 11 вибирають діапазон вихідного струму 0-5, 0-20 або 4-20 мА.
11.3.3 Блок динамічних перетворень Д05
Блок динамічних перетворень типу Д05 призначений для застосування в складних АСР технологічними процесами, наприклад, для реалізації перехресних та інших зв’язків.
Блок Д05 є двоканальним багатофункціональним приладом і містить три модулі (рисунок 11.9):
А001 – алгебраїчний модуль, що виконує функції гальванічного розділення аналогових сигналів щодо входів кожного з двох незалежних каналів, підсумовування аналогових сигналів із масштабуванням за додатковим каналом;
Д005 – модуль динамічних перетворень, що виконує динамічне перетворення аналогових сигналів щодо кожного з двох незалежних каналів за Д-, П-, А- або І-законами, а також демпфування вхідних сигналів при виконанні перетворення за Д-законом;
ИПС01 – модуль джерела живлення.
Модуль А001 виконує наступні функції:
– гальванічне розділення аналогових вхідних сигналів постійного струму щодо кожного входу двох незалежних каналів;
– підсумовування та масштабування аналогових вхідних сигналів постійного струму.
Рівняння статичної характеристики модуля А001:
Y 1 = Х 11 (або Х 12),
Y 2 = Х 21 (або Х 22),
Y 3 = K 3 ∙ (α 31 ∙Х 3 1 + α 32 ∙Х 32 + Х 33), (11.6)
де сигнали Х 11, Х 21 з гальванічним розділенням, а всі інші – без гальванічного розділення.
Функції модуля динамічного перетворення Д005:
– перетворення аналогових сигналів за диференціальним (Д) законом
 . (11.7)
. (11.7)
де KД = K 1, ТД = Т 1 або ТД = Т 2;
– перетворення аналогових сигналів за пропорційним (П) або аперіодичним (А) законом
 (11.8)
(11.8)
 (11.9)
(11.9)
– перетворення аналогових вхідних сигналів за інтегральним (І) законом
 (11.10)
(11.10)
– демпфування аналогових вхідних сигналів при виконанні Д-перетворення;
– дискретне перетворення сигналів q 1, q 2 (0, +24 В) у вихідні сигнали Z 1, Z 2 (0, 10 В).

рисунок 11.9 – Структурна схема блоку Д05
Робота блока Д05 за принциповою схемою (рисунок 11.10):
Дискретне перетворення сигналу q 1 в сигнал z 1 виконується за допомогою двополярного стабілітрона (семістора) 1 V 3, що обмежує сигнал високого рівня до напруги стабілізації.
Зміна законів перетворення виконується за допомогою двох замикачів перемикача 1П, наприклад:
– для встановлення Д-закону потрібно перемикнути гнізда 1а-1г, 1б-1д;
– для встановлення А- та П-закону – 1б-1в, 1д-1е;
– для встановлення І-закону – 1а-1б, 1д-1е;
Для формування П-закону постійна часу інерційної ланки встановлюється нульовою.
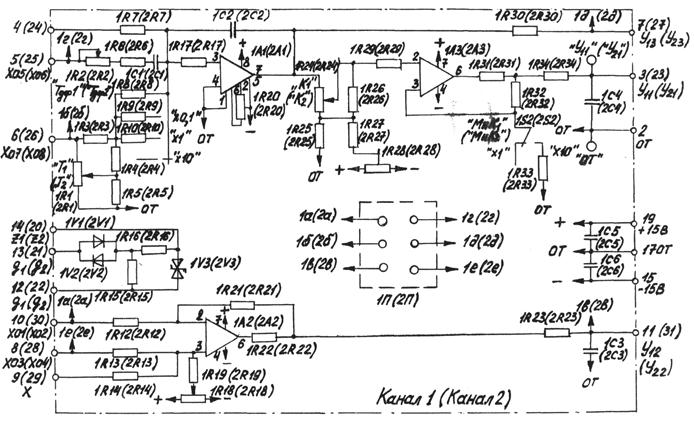
Рисунок 11.10 – Принципова схема модуля Д005
Диференціюючий (інтегруючий) підсилювач виконаний на ОП з високоомними входами А 1 (префікс 1 або 2 для всіх елементів рисунка 11.10 означає номер каналу модуля). Постійна часу перетворення «Т 1» («Т 2») регулюється плавно потенціометром R 1, а її масштабний коефіцієнт вибирається з дискретних значень «×0,1», «×1», «×10» замикачем комутаційних гнізд S 1. Для встановлення нуля підсилювача призначений резистор R 20. Постійна часу демпфування «ТДФ1» («ТДФ2») при Д-перетворенні регулюється потенціометром R 2.
Поиск по сайту: