АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
Послідовність розрахунку циліндричних евольвентних зубчастих передач
Обчислення складних зубчастих механізмів, які працюють в закритому корпусі в масляній ванні, необхідно починати з вихідного (тихохідного) ступеня. Розрахунковим навантаженням для якого є крутний момент на валу шестерні ступеня, тобто момент на проміжному валу згідно з нумерацією за заданою кінематичною схемою. Вихідні дані для розрахунку передачі, включаючи задані, прийняті та раніше обчислені, зведені в табл. 5.12.
Таблиця 3.8
Параметри типових режимів навантаження
| Номер режиму навантаження | Режим навантаження | K HE | K FE | |
| q F =6 | q F =9 | |||
| Постійний режим | 1,00 | 1,00 | 1,00 | |
| Важкий | 0,80 | 0,82 | 0,84 | |
| Середній рівноймовірний | 0,63 | 0,72 | 0,77 | |
| Середній нормальний | 0,56 | 0,63 | 0,69 | |
| Легкий | 0,50 | 0,58 | 0,63 | |
| Особливо легкий | 0,40 | 0,48 | 0,54 |
Коефіцієнти еквівалентності K HE і K FE та коефіцієнт режиму x р в залежності від заданого класу навантаження прийняти із табл. 3.8. Якщо клас навантаження не заданий, для подальших розрахунків слід прийняти середньо рівноймовірний клас навантаження H 0,63 (рис. 3.4; табл. 3.8). При визначенні коефіцієнта концентрації навантаження K β слід враховувати прироблення зубців за часом при твердості робочих поверхонь HB 2≤350.
У цьому випадку K β дорівнює:
 (3.16)
(3.16)
 (3.17)
(3.17)
де  і
і  – коефіцієнти концентрації до приробки і прийняті за графіками рис. 3.3.
– коефіцієнти концентрації до приробки і прийняті за графіками рис. 3.3.
Передачі, у яких твердість робочих поверхонь H HRC2 ≥ 40, не приробляються. Для них значення коефіцієнтів і , прийнятих за кривими рис. 3.3, залишаються незмінними.
Комплексний розрахунок циліндричних евольвентних зубчастих передач виконується за алгоритмом, що викладений нижче. Слід звернуту увагу, що в багатоступінчастому редукторі в першу чергу розраховують параметри тихохідного ступеня. Цей алгоритм оснований на методі еквівалентних моментів і буде реалізований в MS EXCEL.
Приймемо наступні значення індексів:
· j =1 – для усіх параметрів шестерні;
· j = 2 – для усіх параметрів колеса.
1. Визначити коефіцієнт відносної ширини зубчастого вінця[5]:

Знайдене значення ψba округлити до найближчої величини із стандартного ряду:
0,1; 0,125; 0,16; 0,2; 0,25; 0,315; 0,4; 0,5; 0,63; 0,8; 1,0; 1,125.
Існуючі рекомендації надають перевагу значенням ψba =0,35…0,45 для передач з твердістю робочих поверхонь зубців H <320 HB, а також для передач із ступенем точності не грубіше 7 за ГОСТ 1643-81 за будь-якої твердості. Для передач з твердістю робочих поверхонь зубців понад 40 HRC і ступенем точності 8…10 за ГОСТ 1643-81рекомендується ψba =0,25…0,315.
2. Розрахувати міжосьову відстань (мм):

Прийняти найближче стандартне значення. Стандарт ГОСТ 2185-66 має два ряди значень a w (перевагу треба віддати першому ряду):
· перший ряд (мм):
40; 50; 63; 80; 100; 125; 160; 200; 250; 315; 400; 500;
630; 800; 1000; 1250; 1600; 2000; 2500;
· другий ряд (мм):
140; 180; 225; 280; 355; 450; 560; 700; 900; 1120; 1400; 1800; 2240.
3. Визначити модуль передачі (мм):

Примітка. Менші значення модуля рекомендуються при u > 5,0. Для подальших розрахунків прийняти найближче стандартне значення. Як і для a w, стандарт ГОСТ 9563-60 має два ряди модулів:
· перший ряд (мм):
1; 1,25; 1,5; 2; 2,5; 3; 4; 5; 6; 8; 10; 12; 16; 20;
· другий ряд (мм):
1,125; 1,375; 1,75; 2,25; 3,5;4,5; 5,5; 7; 9; 11; 14; 18.
Для приводних зубчастих передач наземних транспортних засобів, що мають відносно низьку швидкість, вибирати більший модуль зачеплення. Модулі менші 2 (мм) не приймати.
4. Розрахувати кількість зубців шестерні z 1 та колеса z 2 через сумарну кількість зубців у передачі:
У прямозубій передачі вочевидь β = 0, а у косозубій значення куту нахилу лінії зубців β має задовольняти умові забезпечення осьового перекриття (град):
Якщо підставити рекомендовані значення параметрів, то сумарна кількість зубців буде знаходитися в діапазоні z Σ = 76…99, а кут β > 8 (зазвичай β <°20).
Далі будуть справедливі формули:
Отримані значення z j округлити до найближчих цілих чисел. Бажано, щоб z 1 та z 2 не мали спільних множників та z 1 було непарним числом.
5. Уточнити передатне число:

Допустиме відхилення від заданого значення ±4%.
6. Знайти значення ділильної міжосьової відстані (мм):

Має бути виконана умова a ≤ a w. Якщо a = a w, то коефіцієнти зміщень x j і коефіцієнт зрівняльного зміщення Δy дорівнюють нулі і можна одразу перейти до пункту 14.
7. Розрахувати коефіцієнт сприйманого зміщення:

Має виконуватись умова 0 ≤ y < 1. Якщо y ≤ −1, необхідно зменшити ділильну міжосьову відстань а корегуючи значення z 1 чи z 2. Якщо 0 > y > −1 прийняти z 2 = z 2−1. Якщо y ≥ 1прийняти z 2= z 2+1. Далі повернутися до п. 5.
8. Визначити кут профілю α t:
9. Визначити кут зачеплення:
10. Розрахувати значення евольвентних функцій для кутів α tw та α t:
Тут значення кутів α t та α tw прийняти в радіанах.
11. Розрахувати коефіцієнт суми зміщень x Σ:
Якщо умова x Σ < 1не виконується, збільшити кількість зубців колеса на одиницю z 2 = z 2+1та повернутися до п. 5.
12. Розбити значення коефіцієнта суми зміщень x Σ між шестернею та колесом:
· якщо  , то
, то 
· якщо  , то
, то 
13. Розрахувати коефіцієнт зрівняльного зміщення:

Повинно бути Δy > 0.
14. Визначити ділильні діаметри шестерні та колеса (мм):

15. Визначити діаметри вершин шестерні та колеса (мм):

16. Визначити діаметри основних кіл шестерні та колеса (мм):

17. Розрахувати кут профілю зуба в точці на колі вершин (град):
18. Розрахувати коефіцієнт торцевого перекриття:

19. Розрахувати ширину зубчастого вінця колеса (мм):

20. Якщо β = 0, перейти до пункту 24.
21. Визначити осьовий крок (мм):

22. Розрахувати коефіцієнт осьового перекриття:

23. Повинно бути ε β ≥ 0. Якщо ця умова не виконується, збільшити b w2 = b w2+2 та повторити п. 22.
24. Розрахувати ширину зубчастого вінця шестерні (мм):

25. Визначити коефіцієнт Z ε, що враховує сумарну довжину контактних ліній:
 при
при 
 при
при 
26. Визначити начальні діаметри (мм):

27. Розрахувати колову швидкість (м/с):

28. Розрахувати еквівалентну кількість зубців:

Вочевидь, якщо β = 0, то z vj = z j.
29. Розрахувати коефіцієнт Y FSj, що враховує форму зуба та концентрацію напружень:
30. Для коефіцієнта, що враховує перекриття зубців, прийняти Y ε = 1.
31. Розрахувати коефіцієнт Y β, що враховує нахил лінії зуба:
32. Розрахувати напруження вигину окремо для зуба шестерні та колеса (МПа):


33. Перевірити умову міцності:

Якщо умова міцності виконується, то перейти до пункту 35.
34. Якщо умова міцності не виконується, прийняти нове більше значення модуля зі стандартному ряду і розрахувати нове значення числа зубців шестерні:

Далі перейти до п. 4.
35. Розрахувати коефіцієнт безпеки за напруженнями вигину:

36. Визначити основний кут нахилу лінії зуба:

37. Розрахувати коефіцієнт Z H, що враховує форму поверхонь зубців у полюсі зачеплення:

38. Обчислити контактні напруження в полюсі зачеплення (МПа):
де w Ht – питома колова сила при розрахунку на контактну міцність (Н/мм):
39. Перевірити умову міцності:

Якщо умова міцності для шестерні або колеса не виконується, необхідно прийняти нове найближче більше значення a w зі стандартного ряду (п. 2) та повторити розрахунки з п. 3.
40. Визначити коефіцієнт безпеки за контактними напруженнями:

41. Розрахувати найбільше контактне напруження за умови дій пікового крутного моменту (МПа):

42. Визначити коефіцієнт безпеки по контактних напруженнях при піковому навантаженні:

Якщо не виконується умова  , необхідно здійснити конструктивні заходи по захисту зубчастої передачі від піку навантаження.
, необхідно здійснити конструктивні заходи по захисту зубчастої передачі від піку навантаження.
43. Розрахувати найбільше напруження вигину окремо для зуба шестерні та колеса (МПа):

44. Визначити коефіцієнт безпеки по напруженнях вигину при піковому навантаженні:

Якщо не виконується умова  ', необхідно здійснити конструктивні заходи щодо захисту зубчастої передачі від піку навантаження.
', необхідно здійснити конструктивні заходи щодо захисту зубчастої передачі від піку навантаження.
45. Розрахувати кут профілю α xj в точці на концентричному колі діаметра d xj (град):
46. Розрахувати кількість зубів в довжині загальної нормалі:

47. Прийняти значення z n j як найближче ціле число до обчисленого значення z nr j .
48. Розрахувати довжину загальної нормалі окремо для шестерні та колеса (мм):

49. Розрахувати радіуси кривизни профілю зуба в нижній точці (мм):
50. Розрахувати радіуси кривизни різнойменних профілів зубів у точках, що визначають довжину загальної нормалі (мм):

Якщо умова  не виконується, прийняти нове більше значення
не виконується, прийняти нове більше значення  та перейти до п. 48.
та перейти до п. 48.
51. Обчислити радіус кривизни профілю зуба в точці на колі
вершин (мм):

Якщо умова  не виконується, прийняти нове менше значення
не виконується, прийняти нове менше значення  − та перейти до п. 48.
− та перейти до п. 48.
52. Друкувати основні розрахункові величини:
· піковий крутний момент на валу шестерні T Hпік1;
· вихідні розрахункові моменти T H1, T F1;
· міжосьову відстань aw;
· колову швидкість v;
· модуль m;
· кількість зубців z 1 та z2;
· передатне число u;
· діаметри начальних кіл d w1 та d w2;
· ширини зубчастих вінців шестерні b w1 та колеса b w2;
· довжини загальних нормалей W 1 та W 2;
· коефіцієнти безпеки за контактними напруженнями  ,
,  та за напруженнями вигину
та за напруженнями вигину  та
та  .
.
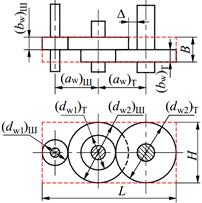
Рис. 3.5. Двоступінчастий редуктор за розгорнутою схемою
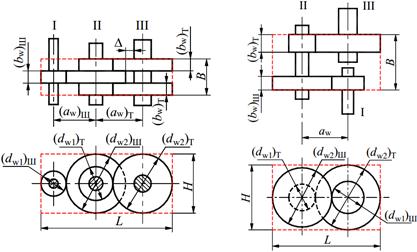
| Рис. 3.6. Двоступінчастий редуктор за схемою роздвоєний шеврон | Рис. 3.7. Двоступінчастий редуктор за співвісною схемою |
При розрахунку двоступінчастого редуктора за розгорнутою схемою (рис. 3.5) та схемою роздвоєний шеврон (рис. 3.6) на наступному етапі визначається міжосьова відстань швидкохідного ступеня:
у якому співвідношенням міжосьових відстаней  задавалися на етапі розподілу передатного числа редуктора u ред.
задавалися на етапі розподілу передатного числа редуктора u ред.
При розрахунку двоступінчастого редуктора за співвісною схемою (рис. 3.7) маємо:

Отримане значення міжосьової відстані  має належати до стандартного ряду (див. п. 2 у наведеному вище алгоритмі).
має належати до стандартного ряду (див. п. 2 у наведеному вище алгоритмі).
Подальший розрахунок, розрахунок швидкохідного ступеня редуктора, принципово не відрізняється від розрахунку тихохідного (починаючи з п. 3) за тією різницею, що параметри позначають індексом «Ш». Для редуктора за співвісною схемою врахувати рекомендації з п. 2.4.4, а модуль ступеня m Ш слід прийняти як найближче менше значення від m Т зі стандартного ряду (див. п. 3 алгоритму).
Поиск по сайту: