АвтоАвтоматизацияАрхитектураАстрономияАудитБиологияБухгалтерияВоенное делоГенетикаГеографияГеологияГосударствоДомДругоеЖурналистика и СМИИзобретательствоИностранные языкиИнформатикаИскусствоИсторияКомпьютерыКулинарияКультураЛексикологияЛитератураЛогикаМаркетингМатематикаМашиностроениеМедицинаМенеджментМеталлы и СваркаМеханикаМузыкаНаселениеОбразованиеОхрана безопасности жизниОхрана ТрудаПедагогикаПолитикаПравоПриборостроениеПрограммированиеПроизводствоПромышленностьПсихологияРадиоРегилияСвязьСоциологияСпортСтандартизацияСтроительствоТехнологииТорговляТуризмФизикаФизиологияФилософияФинансыХимияХозяйствоЦеннообразованиеЧерчениеЭкологияЭконометрикаЭкономикаЭлектроникаЮриспунденкция
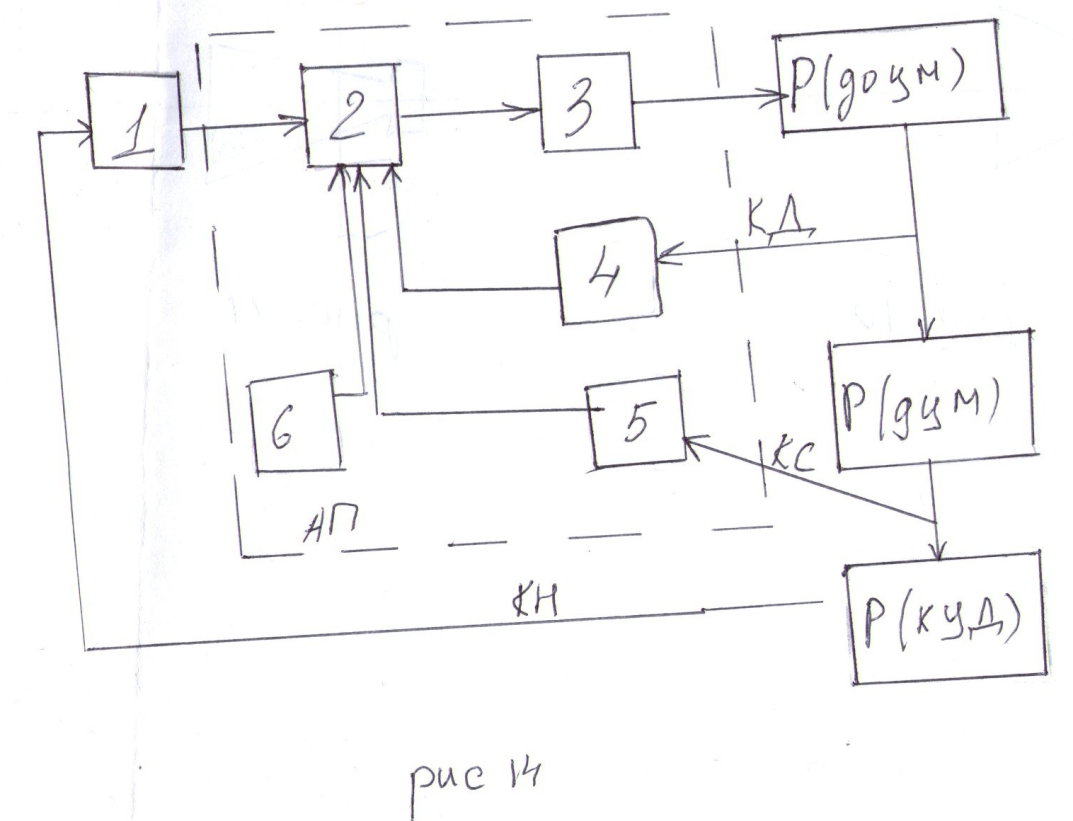
Функциональная схема системы управления полетом и наведения ракеты
В каждом случае часть элементов может отсутствовать.
Классическая система наведения обычно имеет 3 контура:
1 – измеритель параметра управления (датчик системы коррекции координат цели, человек - оператор).
2 – бортовой вычислитель формирует сигналы в соответственную методику наведения.
3 – рулевые привода (создание управляющей силы).
PДОЦМ – уравнение движения ракеты относительно центра масс.
PДУМ – уравнение движения центра масс ракеты под воздействием аэродинамической силы перегрузки.
4 – Измеритель углового движения
5 – Измеритель линейных ускорений и перемещений (5)
КС – контур стабилизации по перегрузке
PКУД – кинематические уравнения совместного движения цели и ракеты.
КН – контур наведения.
6 –программное устройство.
АП – автопилот ракеты.
СУП – обеспечивает поворот вокруг центра масс.
АП выделен, как часть СУ, включающая в себя измерители, формирование управляющего сигнала, рулевые приводы и программные устройства.
Части СУ могут быть как аналоговыми, так и цифровыми.
Необходимо измерять параметры управления, а так же некоторые элементы положения движения центра масс или относительно центра масс.
Для этого служат специальные измерители параметров управления, а так же положения движения ракеты.
СУР, как правило, бывает трех канальной: канал руля высоты, руля направления, руля элеронов (тангаж, крен, рысканье).
Между этим и каналами имеются перекрестные связи.
Динамические уравнения движения ракеты относительно центра масс и уравнения движения центра масс вместе с автопилотом представляют внутренние контура управления, обеспечивающее создание стабилизированного углового положения в процессе управления, а так же демпфирования.
Обнаружение и захват сигнала от цели, селекция цели на фоне помех, управление подрывом БЧ, переключение режимов работы в зависимости от внешних режимов условных состояниях ракеты, управление скоростью полета (если это возможно).
Принцип отличия разных систем управления связано только с различными измерителями параметров управления.
Поиск по сайту: